《我的世界手游》脚手架感应系统怎么做 脚手架自动收瓜机制作教程
游戏攻略[pagesplitxx][pagetitle]脚手架感应系统[/pagetitle]
我的世界自动收瓜机怎么做?自动收瓜机是我的世界手游中利用脚手架制作的全自动装置。那么脚手架收瓜机的制作需要哪些材料和步骤呢?接下来就让我们一起了解一下吧。
我的世界手游自动收瓜机怎么做
今天的机器有两个核心部分:脚手架感应系统+侦测活塞系统,现在正式开始建造环节!
一、脚手架感应系统
在直观的视觉观察上
脚手架的状态有两种
分别为下方无方块时的“四脚相连”
以及下方有方块时的“四脚不相连”
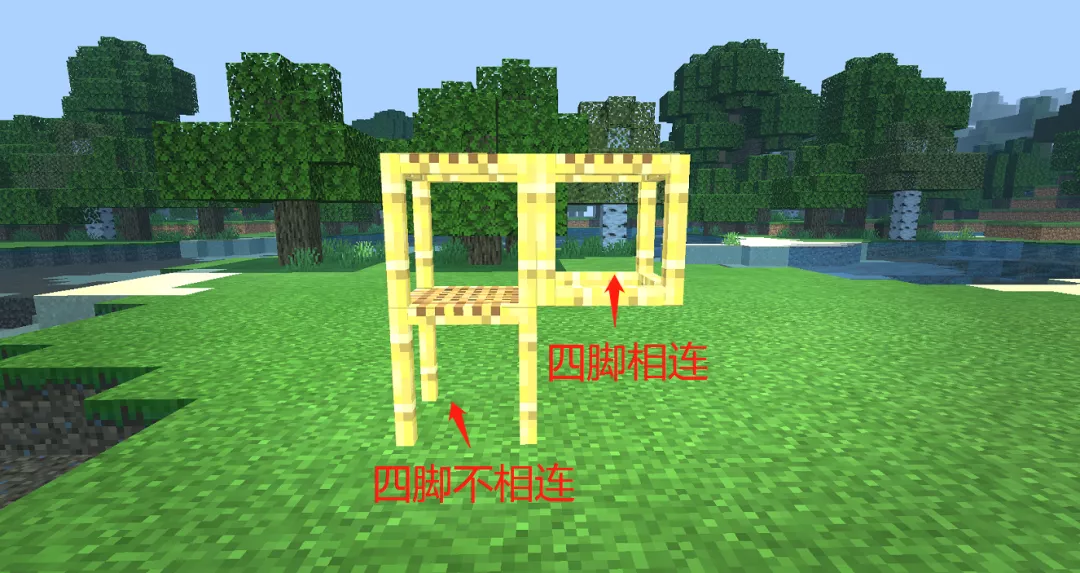
而这两种状态在相互变化时
是可以被侦测器侦测到的哦

点击查看动图
即使侦测器不紧贴直接发生变化的脚手架
这个特性依然可以被触发

点击查看动图
原理也很简单
脚手架无法凭空存在
必须有一个“支点”连接地面
如下图所示
把支点方块上方的脚手架算作第零个脚手架
侦测器的“脸”贴在支点方块外的第三个脚手架上

如果在初始支点方块右方再摆放一个支点方块
此时侦测器的“脸”贴着的脚手架
就变成了新支点方块外的第二个脚手架
脚手架的状态发生了改变
侦测器检测放能

因此在脚手架下方摆放侦测器时
这个侦测器无法放能
此时侦测器就变成了支点方块
侦测上方脚手架的状态永远是第零个脚手架

???????点击查看动图
变化发生时如果想要被侦测
也必须在支点方块和被侦测的脚手架之间
否则同样无法改变状态触发特性哦!

???????点击查看动图
学习了脚手架的特性之后,我们就接着来建造脚手架自动收瓜机(见下页)。
[pagesplitxx][pagetitle]自动收瓜机[/pagetitle]
二、自动收瓜机
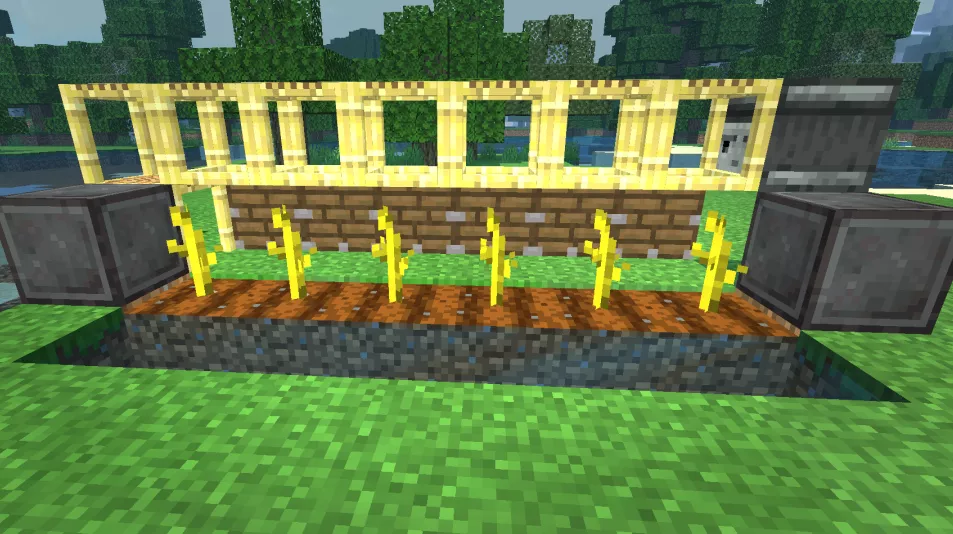
首先按照下图摆放好八个脚手架
并在向外伸出的脚手架的末端摆放一个侦测器
侦测器的“脸”朝着脚手架

在脚手架的其中一侧开辟瓜田
脚手架下方的位置就是以后长瓜的地方啦~

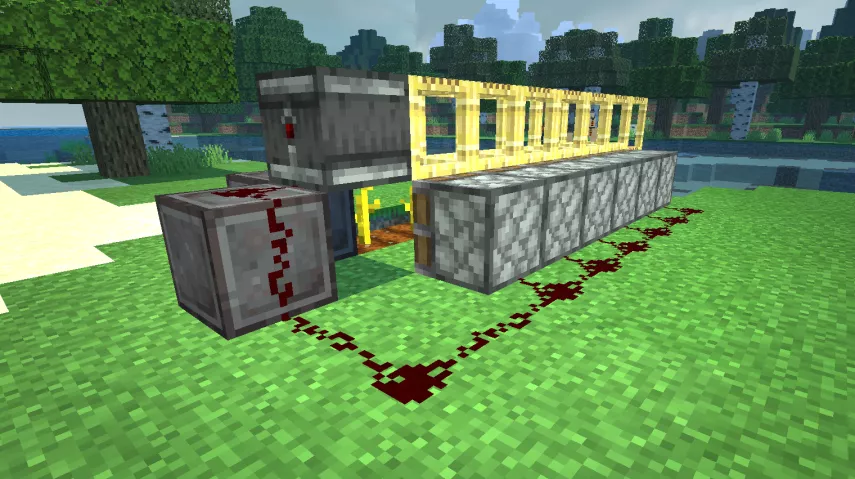
然后在另一侧摆放一排活塞
记得在瓜苗左右两侧摆放任意的普通方块
避免瓜瓜们长歪哦~
最后用红石粉将侦测器与活塞相连就完成了
下面我们来看看效果吧
南瓜/西瓜长成后改变了上方脚手架的状态
侦测器成功侦测变化放能使活塞展开
推掉了各种瓜瓜~

点击查看动图
这个机器非常的简单也节省材料
生存前期很合适使用哦~
以上就是今天给小伙伴们带来的我的世界自动收瓜机的制作方法,希望大家喜欢。
更多相关资讯攻略请关注:我的世界手游专题